精度0.1毫米内!这个灵巧机械手是航天员的维修利器
10月31日,神舟十六号航天员安全返回地球家园,而神舟十七号乘组三名航天员汤洪波、唐胜杰、江新林则开启了在中国空间站为期六个月的在轨驻留,今天,已经是他们在轨的第十天了。这次神舟十七号飞行任务中,有一项特殊的任务,航天员将通过出舱活动,首次进行空间站舱外试验性维修作业。
空间站长期在轨运行,航天员的安全如何保障、航天器的设备怎样维修维护?一起来了解。
在线维修装调操作柜 空间站里的维修利器
在中国空间站的舱内舱外有大量的设备,这些设备一旦出现故障该怎么处理呢?我国科研人员创新性地研发了一套“在线维修装调操作柜”,有了它,空间站的实验设备和载荷一旦出现故障,就可以在轨进行维修。
总台央视记者 褚尔嘉:这里是中国科学院空间应用工程与技术中心的镜像大厅,在这里一共有十四台实验柜。这些实验柜实际上跟在中国空间站中的实验柜是一模一样的。在我身后这里有一个叫在线维修装调操作柜,在中国空间站的梦天实验舱里就有一个完全一样的操作柜,它可以实现在轨对出现故障的一些设备进行维修。
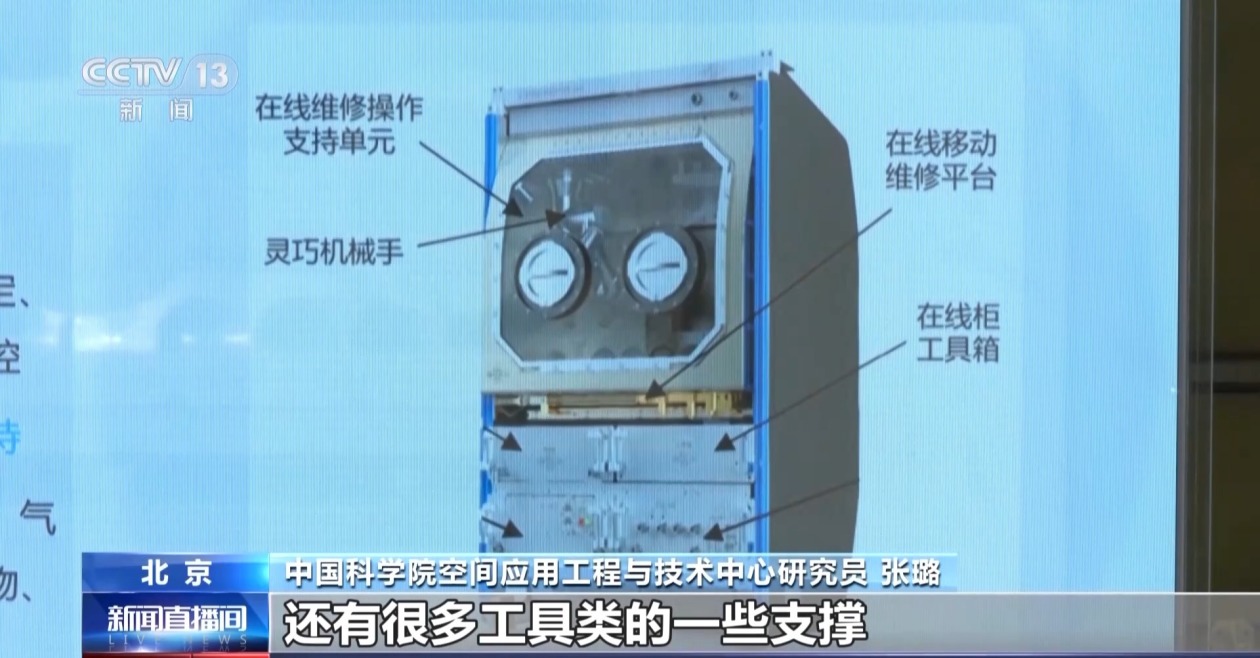
中国科学院空间应用工程与技术中心研究员 张璐:其他的实验柜都属于科学实验柜,它都会有一个或者是多个比较固定的研究主题。我们这个实验柜,它实际上更多的是一个支撑类的实验柜,它并没有很独立的研究方向。像以前,有些(设备)比如说坏了,咱们航天员不是很方便地去进行在轨的维修和更换。那我们这个在线实际上就是指的是在轨的状态下,航天员可以对其他的科学实验柜,包括其他的空间应用系统的一些载荷装置,更换、维修,或者操作需求的时候,这个实验柜提供了一系列的包括结构安装、洁净空间的处理,包括还有机械臂手的辅助操作,还有相应的一些真空、排废气,还有很多工具类的一些支撑,来保障我们这些维修操作能够在轨顺利展开。
移动维修平台 可维修舱外大型载荷
自身体积并不大的在线维修装调操作柜是如何实现维修中国空间站中的大型设备呢?张璐告诉记者,设计之初,他们就已经考虑到了这个问题,为此设计了一些拓展空间功能。
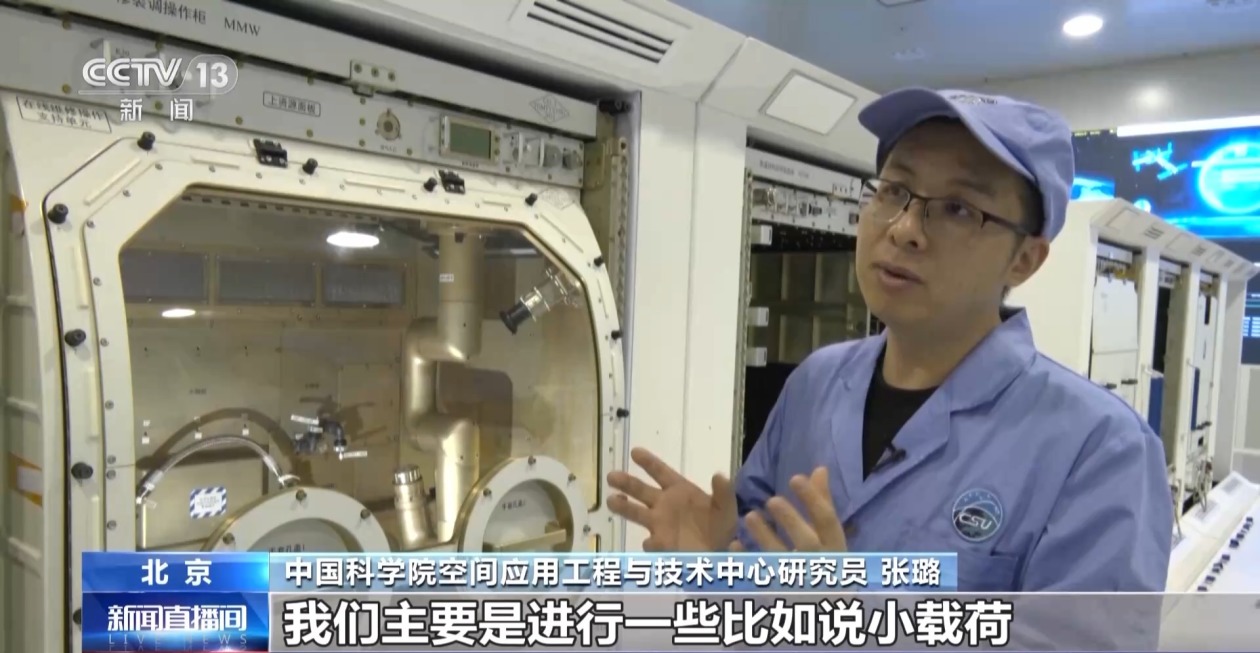
中国科学院空间应用工程与技术中心研究员 张璐:这里面我们主要是进行一些小载荷、标准载荷的维修操作,包括一些有密闭要求的载荷,我们可以通过更换手套进行操作。舱外的大型载荷,它有一些安装、升级,甚至拆装的操作,可以通过把这个平台拉开,展开成一个大概900毫米乘以700毫米的大平板。我的舱外的这些大载荷,可以在这个大平板上安装固定,然后航天员在这个平板上结合我内部丰富的各种载荷的接口,来进行相应的维修操作。
灵巧机械手协助操作 精度可达0.1毫米内
大家之前可能已经了解到,中国空间站的舱外有大小两个机械臂,大机械臂展开后长约10米,最大负载能力25吨,可以在舱外爬行,也可以抓取像问天实验舱和梦天实验舱这样的大型舱段。空间站外的小机械臂,臂长约5米,最大负载3吨,小机械臂操作精度更高,可以单独使用,也可以和大机械臂连接、形成约15米长的组合臂,从而扩大航天员在舱外搭乘机械臂可以到达的范围。
不过你知道吗,咱们的空间站内,还有一个灵巧机械手,就在刚才说到的梦天实验舱在线维修装调操作柜里,它展开后大约七八十厘米长,操作精度可达0.1毫米以内,可以帮助航天员进行维修装调操作。
张璐介绍,在这台在线维修装调操作柜里,拥有一个功能非常强大的灵巧机械手,它拥有十分灵活的7自由度关节,可以轻松地旋转到各种姿态,实现在狭小的空间内做复杂的轨迹规划,操作精度可以达到0.1毫米以内,且响应速度快,能够帮助航天员在轨完成大量复杂维修工作。
中国科学院空间应用工程与技术中心研究员 张璐:像我们有些舱外的载荷进舱之后,包括还有我们一些生物学的载荷,做完实验之后,有一些杀毒、消菌的需求,我们可以通过更换机械臂(手)的末端工具。未来我们可以有不同的末端工具,更换之后可以执行不同的操作任务。有一些很烦琐地拧螺钉或者是做一些简单的采样,我们可以换上一个小型的末端,一个夹爪,或者是一个电动的剪刀,就可以去把这个操作完成。
智能诱导维修系统 在轨维修更便利
除了有灵巧机械手帮忙,科研人员还设计了搭载增强现实技术的在线维修系统,只要戴上一副眼镜,航天员不用翻看任何操作手册,就可以实时接收操作指令,实现便捷在轨设备维修工作。
中国科学院空间应用工程与技术中心研究员 张璐:大家知道我们空间站实验柜就有14个,这14个实验柜都是由各种各样的不同的部组件、科学诊断手段,科学探测的一些设备组成的。那么这些设备就像我们家里用的电器一样,它一定会有一个寿命时间,或者说有一些故障了,那我们航天员必须要在在轨的状态下对这些故障进行诊断,去进行一些维修,包括还有一些组装的操作。
运用增强现实技术 实时接收操作指令
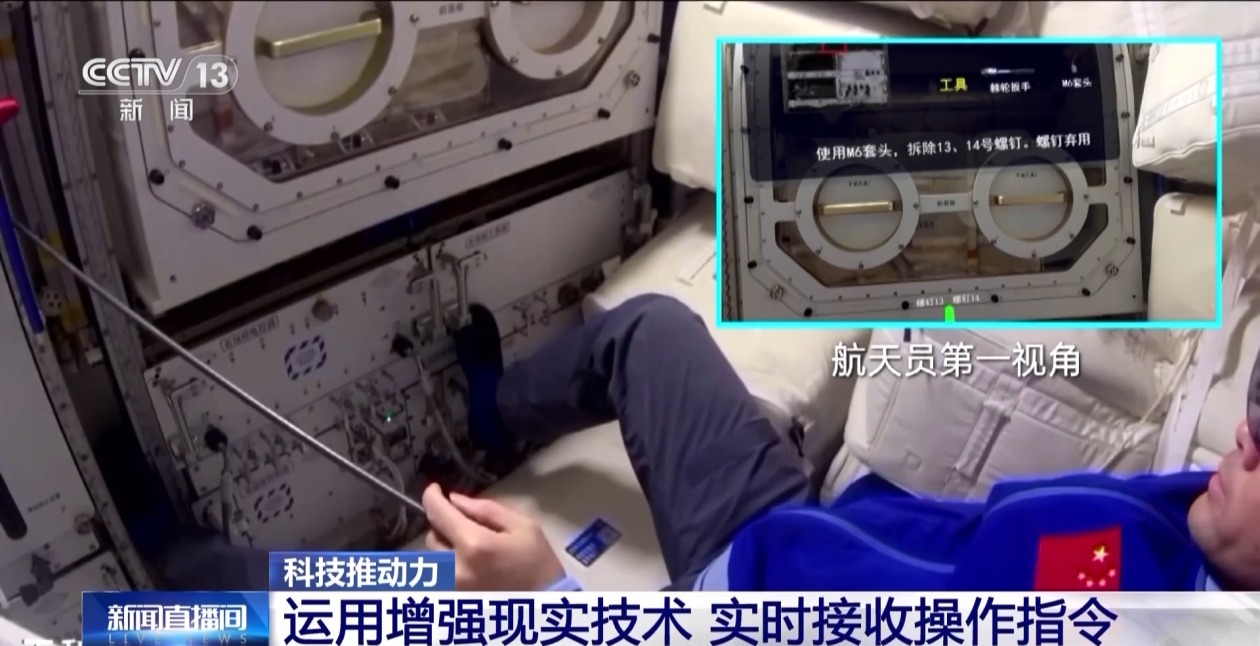
为了更快、更便捷地进行在轨维修操作,科研人员开发了一套智能诱导维修系统。航天员会戴一副眼镜,通过增强现实技术,实时接收语音、文字、视频等操作指令,使维修操作变得不再复杂烦琐。
中国科学院空间应用工程与技术中心研究员 张璐:一步一步地引导航天员进行相应的操作。有的时候你可以想象,如果航天员一边看我们的平板电脑,一边去操作,他其实会非常影响我的这个操作的流畅性。那么当我戴着一个眼镜之后,那么我就不用频繁地去一会儿看我的手册,一会儿去做一个操作,他整个过程可以非常流畅地进行下去。
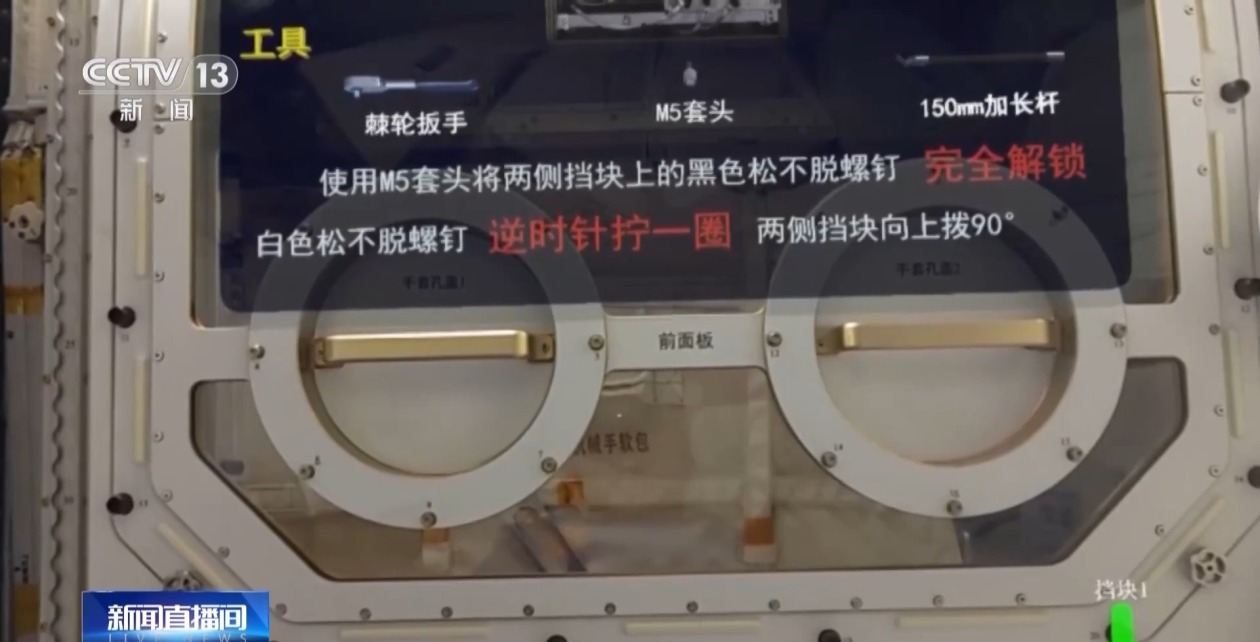
据介绍,这套基于增强现实技术的智能诱导维修系统真正实现了实时准确地将所需要的数字化维修诱导信息叠加到实物对象上,使得航天员能够获取视觉、听觉等方式的维修提示,提高了航天员在轨维修作业效率,为空间站在轨维修维护、装调、实验操作等任务提供了可靠的技术支撑。